機器人的定義和基本組成
發布日期:2022-08-26 10:59 ????瀏覽量:
機器人的定義和基本組成
由于研究的側重點不同,對于機器人的定義,國際上目前尚未有明確的統一標準。綜合各種定義,可將
機器人理解為:機器人是一種在計算機控制下的可編程的自動機器,根據所處的環境和作業需要,它具有至少一項或多項擬人功能,另外還可能程度不同地具有某些環境感知能力(如視覺、力覺、觸覺、接近覺等),以及語言功能乃至邏輯思維、判斷決策功能等,從而使它能在要求的環境中代替人進行作業。
機器人一般由以下部分組成:
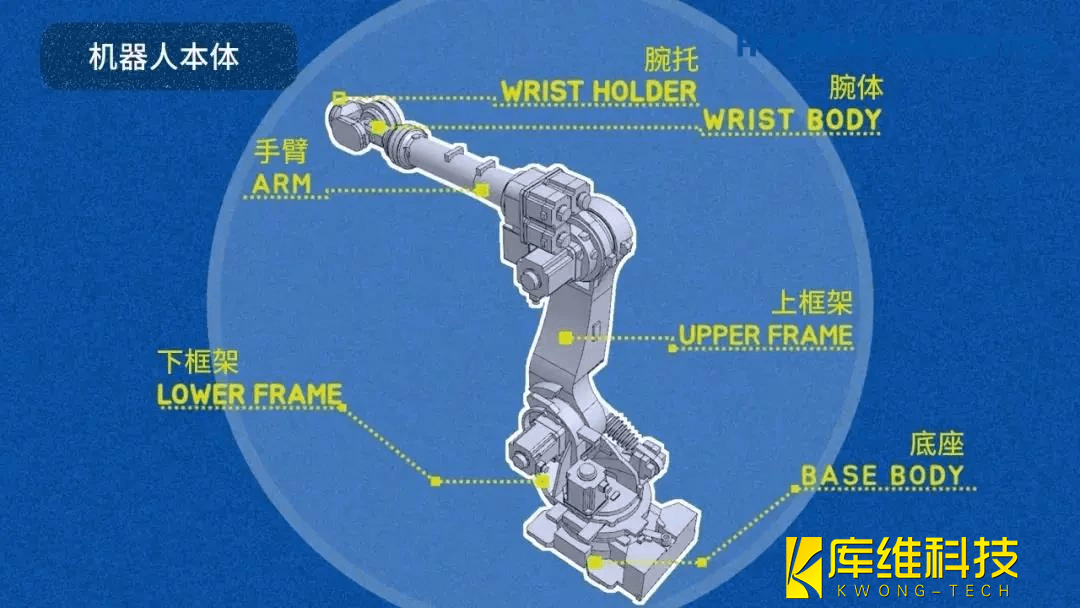
1. 機械本體
機器人的機械本體機構基本上分為兩大類:一類是操作本體機構,它類似人的手臂和手腕,配上各種手爪與末端操作器后可進行各種抓取動作和操作作業,工業機器人主要采用這種結構。另一類為移動型本體結構,主要目的是實現移動功能,主要有輪式、履帶式、足腿式結構以及蛇行、蠕動、變形運動等機構。壁面爬行、水下推動等機構也可歸于這一類。
機器人本體機械結構的動作是依靠關節機器人的關節驅動,而大多數機器人是基于閉環控制原理進行的。伺服控制器的作用是使驅動單元驅動關節并帶動負載超減少偏差的方向動作。已被廣泛應用的驅動方式有,液壓伺服驅動、電機伺服驅動,近年來氣動伺服驅動技術也有一定進展。
3.計算機控制系統
各關節伺服驅動的指令值由主計算機計算后,在各采樣周期給出。主計算機根據示教點參考坐標的空間位置、方位及速度,通過運動學逆運算把數據轉變為關節的指令值。
通常的機器人采用主計算機與關節驅動伺服計算機兩級計算機控制,有時為了實現智能控制,還需對包括視覺等各種傳感器信號進行采集、處理并進行模式識別、問題求解、任務規劃、判斷決策等,這時空間的示教點將由另一臺計算機上級計算機根據傳感信號產生,形成三級計算機系統。
4.傳感系統
為了是機器人正常工作,必須與周圍環境保持密切聯系,除了關節伺服驅動系統的位置傳感器(稱作內部傳感器)外,還要配備視覺、力覺、觸覺、接近覺等多種類型的傳感器(稱作外部傳感器)以及傳感信號的采集處理系統
5. 輸入/輸出系統接口
為了與周邊系統及相應操作進行聯系與應答,還應有各種通訊接口和人機通信裝置。
工業機器人提供一內部PLC,它可以與外部設備相聯,完成與外部設備間的邏輯與時實控制。一般還有一個以上的串行通訊接口,以完成磁盤數據存儲、遠程控制及離線編程、雙機器人協調等工作。一些新型機器人還包括語音合成和識別技術以及多媒體系統,實現人機對話。
相關文章